





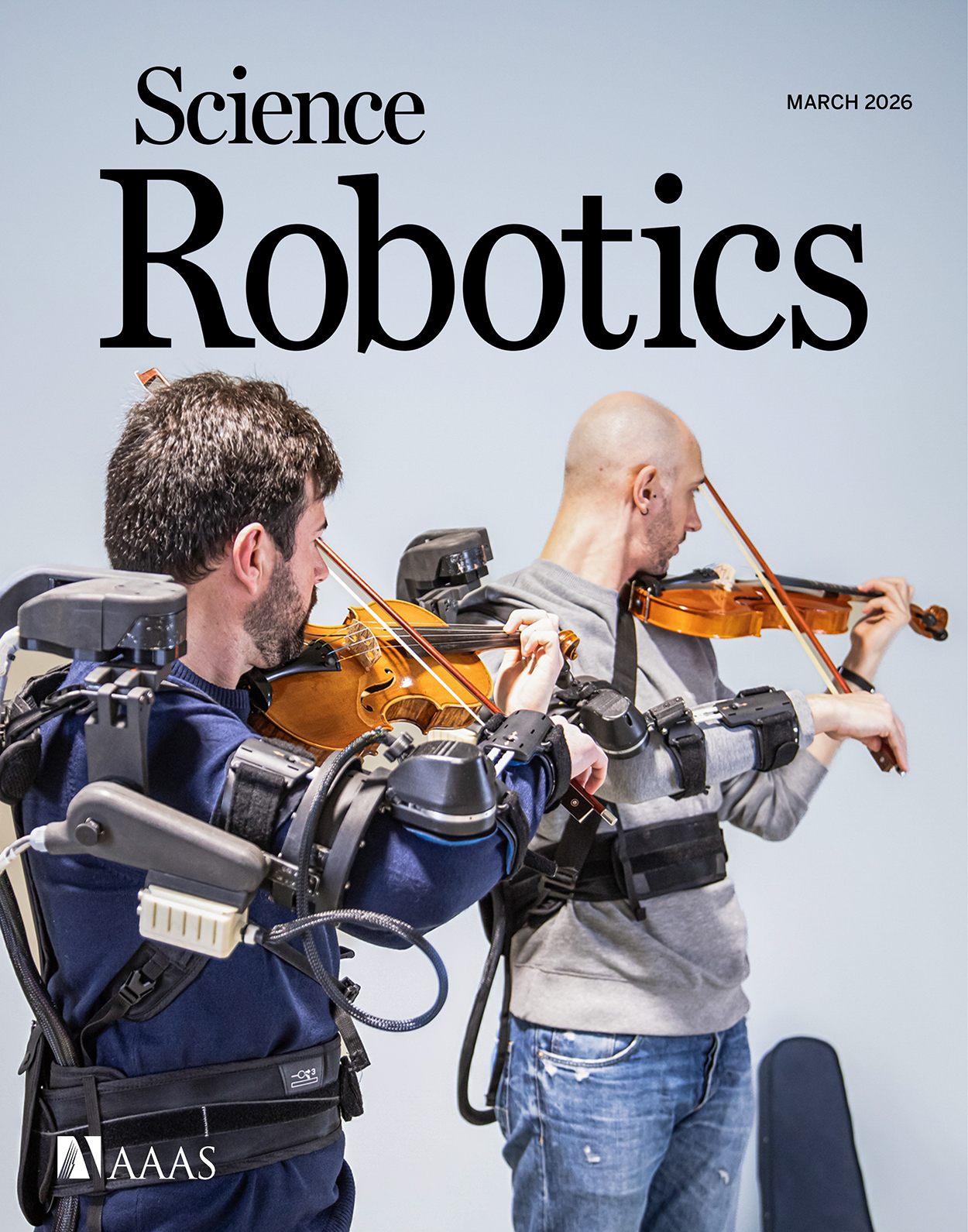
В робототехнике активно изучают роль тактильной обратной связи в реальных совместных действиях, которые традиционно опираются на слуховые и зрительные сигналы. Например, двое скрипачей исполняли специально написанные музыкальные произведения в экзоскелетах, которые создавали крутящий момент в плечевом и локтевом суставах в зависимости от различий в движениях партнеров.
Исследование показало, что тактильная обратная связь улучшает координацию между музыкантами по сравнению с выступлениями, основанными только на визуальной обратной связи.
Метод имитационного обучения (ИО) используется теперь в робототехнике. Он позволяет роботам выполнять новые задачи, обучаясь на основе демонстраций. Однако его эффективность часто ограничивается необходимостью прямого сопоставления навыков обучающегося и демонстрирующего робота в идентичных условиях.
Это ограничивает применимость ИО в различных средах и генерализацию для роботов с разными физическими характеристиками.
Чтобы решить эти проблемы, была предложена система обучения с имитацией намерений (Intention-Aligned Imitation Learning, IAIL) — подход к адаптации поведения, который расширяет традиционные возможности обучения с имитацией. Такая система обучения позволяет роботам воспроизводить движения, демонстрируемые разными людьми, даже в ситуациях, с которыми они раньше не сталкивались.
IAIL, вдохновленная культурным обменом между людьми, согласовывает и адаптирует движения роботов на основе высокоуровневых намерений, описанных на естественном языке, а не путем прямого копирования движений.
Такое согласование достигается за счет создания общего пространства намерений, которое связывает движения, выполняемые роботом, с лингвистическими аннотациями, что позволяет адаптировать поведение во время логического вывода к различным воплощениям и контекстам окружающей среды.
Кроме того, платформа поддерживает масштабируемое распределение задач в разнородных группах роботов, учитывая различия в их возможностях и ограничениях.
IAI протестирована в ходе реальных экспериментов с участием семи различных роботов, выполнявших многоэтапные совместные задачи в 30 сценариях. Результаты показывают, что IAIL обеспечивает надежную адаптацию поведения в соответствии с намерениями при различных вариантах исполнения, способах движения и конфигурации задач.
Новые возможности позволяют гибко переносить поведение с одного робота на другой и создавать устойчивые автономные мультироботизированные системы для надежного взаимодействия в реальных условиях.
https://www.science.org/




