Глубоководные слои океана представляют огромную сложность для исследования из-за экстремального давления, температуры и отсутствия света. Последние достижения ученых и технологий, особенно в Китае, позволяют считать, что человечество находится на новом этапе практического освоения морских глубин. И помогать в этом нам будут мягкие роботы для глубоководных исследований.
В отличие от традиционных морских роботов, которым для защиты требуются специальные металлические корпуса, глубоководные организмы прекрасно себя чувствуют без таких громоздких конструкций, устойчивых к давлению. Их способность адаптироваться к давлению, уникальные способы передвижения и развитые органы чувств вдохновили ученых на создание легких и компактных мягких роботов.
Далее мы расскажем о трудностях, последних достижениях и стратегиях разработки глубоководных мягких роботов, вдохновленных природой.
Мягкие роботы недавно проверены в ходе глубоководных исследований Марианской впадины
Исследование Мирового океана — чрезвычайно важная задача, которая может помочь раскрыть тайны и обнаружить скрытое морское биоразнообразие, энергетические ресурсы и запасы полезных ископаемых.
Глубоководные районы океана представляют собой сложнейшую задачу из-за экстремального гидростатического давления, низких температур и вечной тьмы.
К таким областям относятся участки океана на глубине от 1000 до 11 000 м, которые на 95% остаются неизученными. Эта обширная неизведанная область естественно стимулировала развитие технологий глубоководных роботов.
До недавнего времени глубоководные аппараты и мобильные роботы представляли собой устойчивые к давлению конструкции с герметичными корпусами и системами компенсации давления.
Принято считать, что только под такой защитой сможет работать электронная начинка — мозг робота. Такие сложные машины имеют большой вес, риск усталостного разрушения конструкции и ограниченную адаптивность при работе с хрупкими глубоководными организмами.
Как известно глубоководный аппарат Nereus HROV под давлением взорвался на глубине 9900 м. Поэтому исследователи обратились к глубоководным организмам в поисках инновационных решений для глубоководных исследований.
Мягкие роботы, созданные по образу и подобию удивительных глубоководных организмов, воспроизводят мышечные сокращения и теоретически обладают неограниченной свободой движений.
Их полностью мягкие конструкции состоят из податливых материалов и высокодеформируемых компонентов
Глубоководные мягкие машины, вдохновленные природой
В последние десятилетия в области «акватической мягкой робототехники» и «исследований морских глубин» наблюдается стремительный прогресс. Благодаря обилию идей, почерпнутых у глубоководных существ, глубоководные мягкие роботы, вероятно, продемонстрируют безграничный потенциал в таких задачах, как деликатные манипуляции и неразрушающее исследование.
Однако внедрение достижений в этих двух областях остается сложной технической задачей, отчасти из-за отсутствия устоявшихся принципов проектирования и трудностей, связанных с комбинированием ключевых технологий.
Таким образом, для создания мягких роботов, способных исследовать бескрайние неизведанные океаны, необходимо более тесное сотрудничество робототехников, биологов, материаловедов и инженеров.
Чтобы справиться с трудностями, возникающими в таких суровых условиях, необходимо пересмотреть подходы к приведению в действие, сенсорике и механическому конструированию. По сути, понимание того, как глубина влияет на выполнение этих задач, является фундаментальным вопросом.
Принципы проектирования мягких приводов для глубоководных аппаратов
Глубоководные беспозвоночные используют гидростатические скелеты и гидростатические мышцы для поддержки своего мягкого тела, приведения в действие и обеспечения передвижения в условиях экстремального давления.
Гидростатический скелет обычно состоит из заполненной жидкостью полости (целома), окруженной мышечными слоями, которые противодействуют внутреннему давлению жидкости, обеспечивая движение.
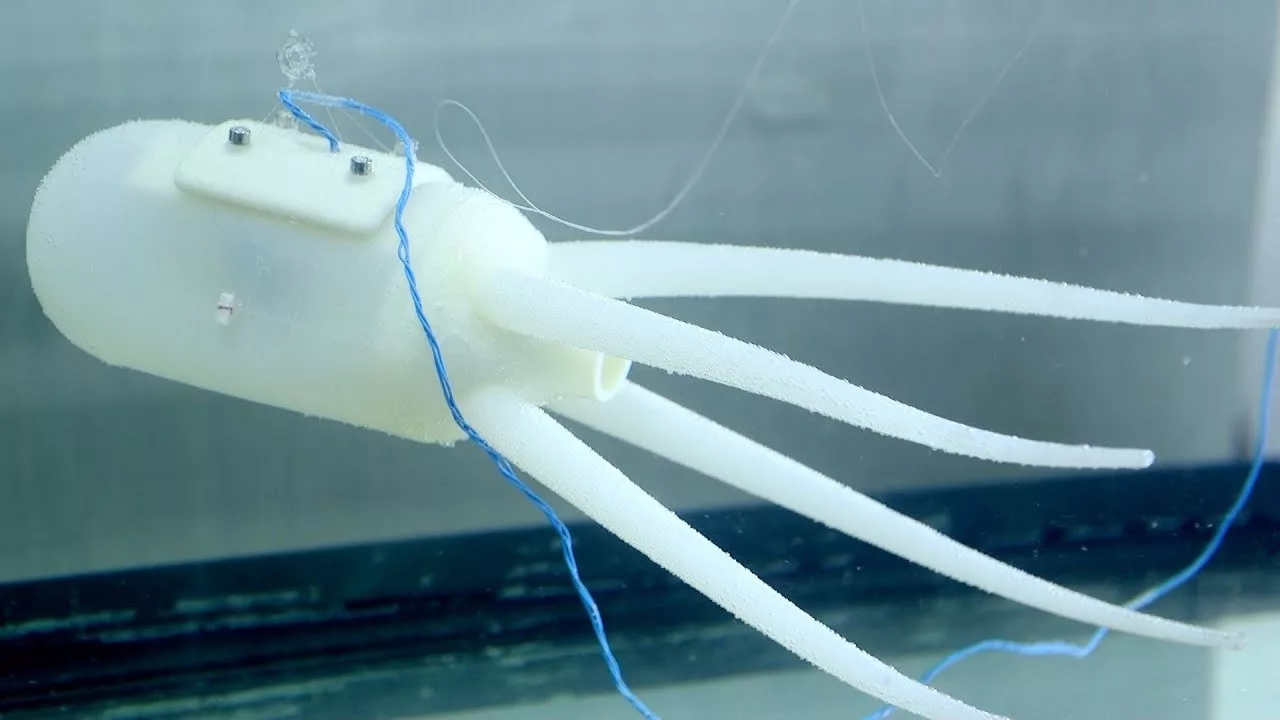
Например, морские анемоны регулируют форму своего тела, активно манипулируя внутренней водой, функционируя подобно гидравлическим насосам. Напротив, мышечный гидростат представляет собой конструкцию, состоящую из плотно расположенных мышц, обеспечивающих поддержку скелета и создающих силы, необходимые для движения и деформации. Глубоководные осьминоги, похожие на хобот слона, выполняют ловкие манипуляции своими совершенно мягкими руками (рис. a).
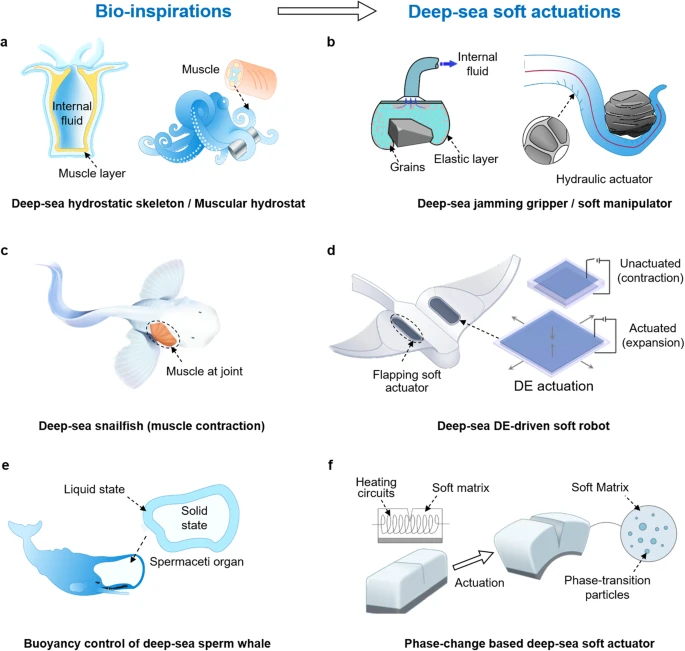
Глубоководные беспозвоночные (например, актинии, осьминоги) приводят в действие и совершают различные движения (например, манипуляции) с помощью гидростатического скелета и гидростатических мышц, что послужило вдохновением для разработки (b) гидравлического захвата для универсального глубоководного захвата и гибкого манипулятора.
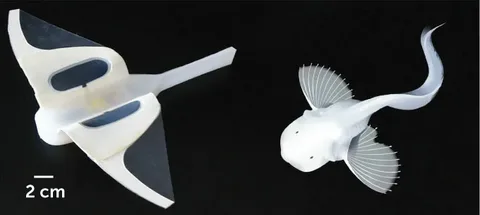
Глубоководные позвоночные используют сокращение и растяжение мышц, прикрепленных к скелету, для создания движущей силы при передвижении. При подаче напряжения на мембрану из диэтиламиноэтила (d) индуцированная электростатическая сила приводит к уменьшению ее толщины и увеличению площади, что было использовано для приведения в движение глубоководного мягкого робота.
(e) Кашалот регулирует свою плавучесть, контролируя переход из жидкого состояния в твердое в своем спермацетовом органе.
(f) Мягкие приводы, в которых используются материалы, меняющие фазовое состояние, могут быть созданы по аналогии с механизмом изменения фазового состояния спермацетового органа и использоваться для легкого приведения в действие в условиях давления.
Гидравлические мягкие приводы были разработаны по образу и подобию гидростатических скелетов глубоководных беспозвоночных. Эти приводы состоят из гибкой камеры, заполненной водой, которая служит одновременно для компенсации давления и в качестве рабочей жидкости.
Благодаря балансу давления между внутренней камерой и окружающей ее открытой водой этот тип мягких приводов подходит для работы в условиях высокого гидростатического давления. Когда внутренняя жидкость (вода) закачивается в механически запрограммированную камеру или выкачивается из нее, могут выполняться движения с несколькими степенями свободы, в том числе раздвигание, сгибание и скручивание.
Кроме того, универсальный зажимной захват служит еще одним вариантом для глубоководных мягких манипуляций. Этот захват состоит из гибкого баллона, наполненного гранулированными частицами и жидкостью. Когда внутренняя жидкость откачивается, зерна (гранулированные частицы) застревают друг с другом, вызывая деформацию баллона, создающую силу захвата (рис. b). Эта стратегия позволяет нескольким мягким манипуляторам аккуратно обволакивать хрупкие глубоководные образцы и манипулировать ими.
Глубоководные позвоночные плавают, прилагая усилие к окружающей воде. Периодическое сокращение и расслабление мышц, прикрепленных к поддерживающим их скелетам, создают толчок вперед и управляют направлением плавания (рис. с).
Искусственные мышцы, такие как приводы из диэлектрического эластомера (DEAs), потенциально могут выполнять аналогичную функцию при мягком приведении в действие.
При подаче напряжения на мембрану из двойного электрического слоя индуцированная электростатическая сила деформирует мембрану, уменьшая ее толщину и увеличивая площадь (рис. d).
В отличие от вышеупомянутых гидравлических мягких приводов, двойные электрические слои легко приводятся в действие и управляются без использования проводов и широко применяются в подводных мягких роботах.
Двойные электрические слои выделяются среди приводов, реагирующих на раздражители, благодаря большой амплитуде движения, быстрому отклику и низкому энергопотреблению. Благодаря этим особенностям они особенно хорошо подходят для глубоководных мягких машин, особенно по сравнению с термочувствительными приводами, предназначенными для периодического мягкого воздействия.
Высокое давление на большой глубине остается серьезным препятствием для осуществления фазового перехода из жидкого состояния в газообразное). Благодаря распределению микропузырьков этанола в силиконовых материалах, мягкий привод с фазовым переходом обеспечивает деформацию до 900 %.
Это может стать потенциальным решением для компактного регулирования плавучести глубоководных мягких роботов. Без внутреннего воздушного пузыря кашалоты могут достигать нейтральной плавучести на разных глубинах, регулируя температуру и фазовый переход (из жидкого состояния в твердое) своего спермацетового органа.
Этот привод также использовался для регулировки плавучести на глубине 3223 м. В будущем ученые, возможно, сосредоточатся на разработке мягких материалов, способных к фазовым переходам, с более высокой энергоэффективностью и скоростью отклика.
Мягкие роботы, устойчивые к давлению
Морфология рыбы-улитки послужила источником вдохновения для разработки «устойчивого к давлению» глубоководного мягкого робота, способного выдерживать сильное гидростатическое давление. В этой конструкции бортовая электроника подключается проводами или распределяется отдельно на небольших печатных платах, которые затем децентрализованным образом помещаются в мягкую матрицу (рис. e).
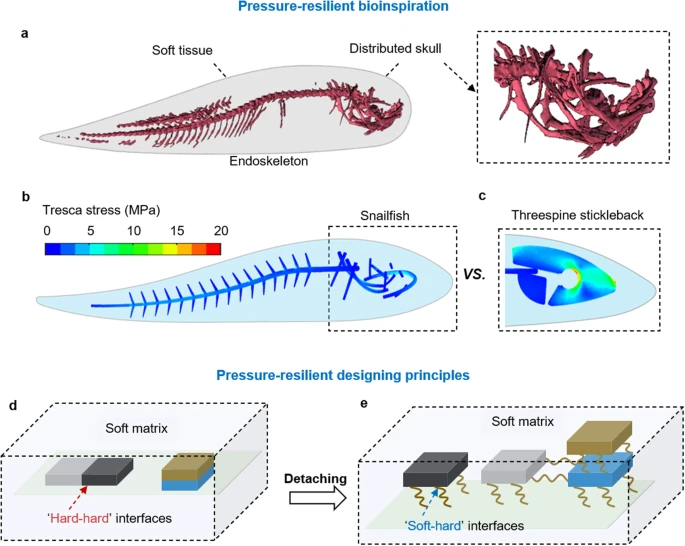
Результаты конечно-элементного анализа показывают, что при гидростатическом давлении 110 МПа напряжение сдвига между децентрализованными электронными компонентами значительно снижается по сравнению с централизованной конструкцией, в которой электронные компоненты расположены близко друг к другу. Кроме того, была проведена серия экспериментов для проверки устойчивости к давлению децентрализованных электронных компонентов, встроенных в мягкую матрицу.
Этот «децентрализованный» подход к проектированию, направленный на снижение напряжения сдвига в герметичной электронике, был усовершенствован и теперь включает в себя такие стратегии, как разделение, дистанцирование и устранение пустот.
В частности, «разделение» означает устранение «жестких» интерфейсов за счет устранения прямых контактов между жесткими компонентами с ярко выраженным механическим контрастом.
«Дистанцирование» подразумевает увеличение расстояния между соседними электронными компонентами на печатных платах. Для обеспечения надлежащей функциональности при экстремальных давлениях необходимо использовать электронику без внутренних пустот. Например, керамические конденсаторы — идеальная альтернатива электролитическим.
В будущем могут появиться гибкие электронные устройства и «мягкие» схемы (например, на основе жидкого металла), которые также предлагают многообещающие решения для обеспечения питания, управления и сенсорных функций полностью мягких интеллектуальных машин благодаря их устойчивости к давлению на больших глубинах.
Что заменит зрение на глубине. Бесконтактное зондирование
Некоторые глубоководные существа (например, Benthobatis moresbyi) эволюционировали со специальными органами, излучающими слабое электрическое поле, и массивами электрорецепторов для обнаружения окружающих их объектов.
Сравнивая интенсивность электрических полей, воспринимаемых каждым электрорецептором, эти существа могут достичь бесконтактного восприятия и локализации, способности, известной как электролокация.
Китообразные используют эхолокацию для точного определения местоположения объектов на больших расстояниях, излучая звук и обнаруживая отраженные акустические волны. Был разработан гибкий акустический приемопередатчик с биоинспирированием, состоящий из пьезоэлектрических электродов, прикрепленных к гибкой подложке, для обеспечения связи на расстоянии и эхолокации.
Работая в качестве передатчика, устройство преобразует электрический сигнал в модулированную акустическую волну. Одновременно, как приемник, он обнаруживает входящие акустические волны и генерирует суммарные заряды на электродах, которые могут быть преобразованы в измеряемые электрические сигналы.
Интеграция этого типа компактных и гибких акустических датчиков потенциально может позволить мягким роботам осуществлять дистанционную связь, зондирование и эхолокацию в суровых глубоководных условиях. Чтобы увеличить дальность обнаружения и коэффициент разрешающей способности, будущие направления включают использование материалов с высоким пьезоэлектрическим коэффициентом и оптимизацию распределения электродов.
Глубоководные пловцы
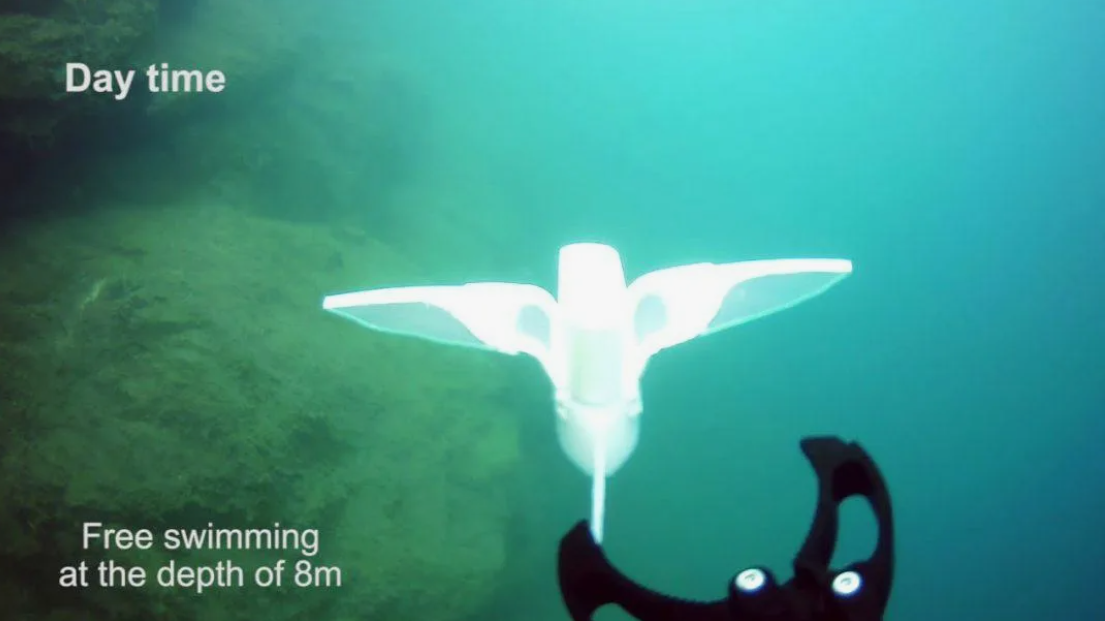
Вдохновившись уникальными особенностями глубоководных рыб-улиток, ученые разработали мягкого робота-рыбу, который может работать на морском дне Марианской впадины. Этот мягкий робот, не требующий громоздких металлических конструкций, способен выдерживать экстремальное давление в 110 МПа.
Эффективность плавания и способность адаптироваться к давлению этого робота были тщательно проверены в ходе систематических экспериментов в камере для испытаний давлением. Примечательно, что этот мягкий робот способен свободно плавать на глубине более 3000 м.
Он также прошел полевые испытания и успешно сработал на глубине около 10 900 м в открытом море. Это исследование открывает путь к созданию нового поколения глубоководных мобильных аппаратов и демонстрирует перспективность мягких машин, вдохновленных биологическими организмами, которые можно использовать в экстремальных условиях.